基于ADAMS的玉米收割机主要部件仿真分析

摘要:采用离散梁法建立玉米秸杆模型,利用UG建立分禾器和摘穗辊模型,导入ADAMS后添加相应约束进行仿真分析。通过该方法实现了分禾器和摘穗辊参数设计的系列化,得到了满足实际需要的三维模型,缩短了开发周期,为新型自走式玉米收割机的研制提供了一定的理论依据。
关键词:玉米收割机;分禾器;摘穗辊;仿真;ADAMS
0引言
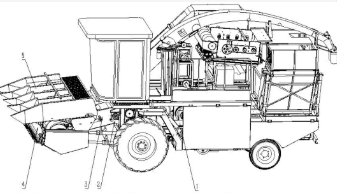
我国玉米耕、种、收综合机械化水平达到42.8%。其中,机耕水平达60%,机播水平达59%,机收水平仅为7.2%。玉米机收已成为玉米生产机械化的瓶颈,现有开发机型多为秸秆粉碎型,整机结构尺寸大。实践证明,这种机型不适合东北地区的小田块玉米收获。因此,项目组提出了《新型自走式玉米收割机的研制》课题,旨在开发一种适应东北地区使用、配套动力14.7kW柴油机的自走式立辊型玉米收割机。其产品开发对提升东北地区玉米机收水平、带动玉米产业的可持续健康发展具有十分重要的意义。在机械产品研发过程中,一般经过样机设计、试制、试验、改进等步骤,开发过程周期长、成本高,并且许多参数的确定是凭借设计者的经验,对产品的质量产生了严重的影响。虚拟样机技术是当前设计制造领域的一项新技术[1],运用虚拟样机技术开发农业机械产品,可以使前述状况得到显著改善。为此,通过UG构建分禾器和摘穗辊三维模型,运用ADAMS进行运动仿真分析[2],为进一步研制新型自走式玉米收割机提供技术参考。
1玉米秸秆的建模
项目组研制的新型自走式玉米收割机中,分禾器是重要的工作部件之一。在工作时,其与玉米秸秆直接接触,彼此间存在相互作用力。所以,对玉米收割收稿日期:2013-10-14基金项目:吉林省教育厅“十二五”科学技术研究项目(吉教科合字[2012]第296号);吉林省科技发展计划项目(20120205)作者简介:明哲(1972-),男,吉林吉林人,副教授,硕士,(E-mail)jlnkjxgc@126.com。机主要工作部件进行运动仿真,必须对玉米秸秆正确建模,构建正确的玉米秸秆虚拟模型,在仿真过程中具有重要意义。为此,通过离散梁法在ADAMS中构建玉米秸秆模型,定义相应的约束力,最终得出玉米收割机的设计和性能参数。
2分禾器的仿真分析
玉米收割机在工作时,分禾器主要作用是将玉米秸秆喂入夹持输送机构,以便对玉米植株进行不对行收获。所以,分禾器设计得是否合理,直接影响玉米收割机的工作性能。具体创建方法如下:1)在UG中建立的分禾器模型,以ParaSolid格式导入ADAMS中;2)为分禾器添加移动副;3)为分禾器设置初始速度,设定X方向初始速度为1.38m/s;4)为分禾器和玉米秸秆添加碰撞类型SolidToSolid;5)设置X轴正向为分禾器的前进方向,Y轴正向为垂直地面竖直向上的方向,Z轴负向为分禾器工作时玉米秸秆的水平弯曲方向,仿真秸秆在极限位置,仿真情况如图1和图2所示。
2.1玉米秸秆与分禾器作用运动学仿真
参考工作实际情况,设置分禾器距地面0.25m,仿真时间0.35s,选取玉米秸秆上1.025m处为平均结穗高度。当分禾器行进速度为1.38m/s时,玉米秸秆结穗点在分禾器作用下沿X轴、Y轴、Z轴方向上的位移仿真曲线如图3、图4和图5所示。由图3~图5可知,结穗点在X轴方向上的弯曲量为0.16m;随着秸秆的运动,结穗点在Y轴方向上距离地面高度逐渐减小,从离地1.025m下降到0.832m,降低了0.193m;玉米秸秆在分禾器接触挤压下,在Z轴负向上有横向弯曲,最大位移为0.43m。经计算得,在XY平面内,玉米秸秆与垂直地面方向最大弯曲角度为10.9°;在YZ平面内,玉米秸秆与竖直方向的最大弯曲角度为27.3°。由此可知,玉米秸秆与竖直方向的最大合成夹角为28.8°。
2.2与分禾器作用的玉米秸秆动力学仿真
分禾器在与玉米秸秆的作用过程中的作用力以摩擦力为主。当分禾器行进速度为1.38m/s时,作用力仿真曲线如图7所示。
3摘穗装置的分析与仿真
3.1摘穗辊的建模
摘穗辊的两个辊采用齿轮传动,建模时对其进行简化,然后导入ADAMS,再添加一些相应的约束之后就可以进行运动仿真分析。在安装摘穗辊的时候,一要保证两个齿轮的准确啮合位置,二要考虑果穗在摘穗辊上停留时间尽量较短,从而减少果穗的损失。因此,安装时设置两个摘穗辊不在同一高度上,内侧摘穗辊低于外侧摘穗辊。构建的摘穗辊模型如图8所示。
3.2摘穗辊运动学仿真
按照工作实际情况,选择平均结穗高度在玉米秸秆上1.025mm处,设置X轴正向为机器的前进方向,速度为1.38m/s;Y轴正向为竖直向上的方向;Z轴为横向。设置摘穗辊转速为1000r/min,仿真时间0.8s,步数500,对摘穗辊工作过程进行仿真,研究摘穗辊与竖直面夹角分别为25°和30°工作时,摘穗辊运动过程中各种参数。图9~图12为摘穗辊与竖直面成30°时在摘穗辊作用下玉米秸秆结穗点处的位移、速度变化曲线;图13~图16为摘穗辊与竖直面成25°时在摘穗辊作用下玉米秸秆结穗点处的位移、速度变化曲线。
比较仿真结果可以看出,摘穗辊与竖直面夹角为30°时,其工作性能更加稳定。因此,设计的新型玉米收割机选择其摘穗辊与竖直面成30°角。
4结语
通过对玉米收割机的主要部件构建三维模型,并进行动力学和运动学的仿真分析,可以得到收割机工作时的一系列运动参数,从而缩短收割机开发周期,降低研制成本,为其进一步优化设计提供参考。
参考文献:
[1]贾长治.MDADAMS虚拟样机从入门到精通[M].北京:机械工业出版社,2010.
[2]陈德民.精通ADAMS2005/2007虚拟样机技术[M].北京:化学工业出版社,2010.
[3]胡珊珊.履带式小型甘蔗收割机虚拟样机仿真分析及试验研究田[D].南宁:广西大学,2005.
[4]吴修远,刁培松,于红鹏,等.基于虚拟样机技术的玉米收获机分禾器仿真分析[J].农业装备与车辆工程,2009(1):31-33.
明哲
《基于ADAMS的玉米收割机主要部件仿真分析》
- 职称论文刊发主体资格的
- 政法论文浅析工会法主体
- 化学在初中教学中的情感
- 中学教育论文思想政治方
- 法治论文投稿法治型市场
- 杂志社论文发表浅析推动
- 新疆教育报投稿浅析学生
- 分男女招生录取的合宪性
最新优质论文
- 舞蹈的地域特征论文发表
- 科学管理研究是评职称认
- 安徽体育科技发表论文要
- 论文发ei需要润色吗
- 医学论文投英文期刊怎么
- 水文水资源观测论文发表
- 经济全球化退与进论文发
- 论文转投是什么意思
论文发表问题热点
- 哪里有2018中文核心期刊目
- 二级项目管理师评职资格
- 两会声音:解决基层医技
- 工程造价师职称资格报考
- 护理职称论文准备选题技
- 什么样的职称论文才能通
- 申报高级政工师发论文要
- SCI论文投稿状态有哪些各